Quadcopter
|
Several graduate students decided they wanted to create a quadcopter for fun and asked me to join their group. Each individual was tasked with a job, which included power, control, programming, etc. I was tasked with hardware design and some programming. After we decided as a group what our design would be, we ordered the parts needed and I began constructing the copter. I used this project as part of my final project in my Probabilistic Graphical Modeling course. The copter was designed to autonomously traverse a maze and reach a designated finish while avoiding obstacles and finding potential shortcuts. This is an unfinished project and was pas onto undergrads to work on and I working closely with them as they continue on the project.
Attached is a general design document with more information about our project. The final report and power point for the work that tied into the quadcopter design for maze solving.
|

|
||||||
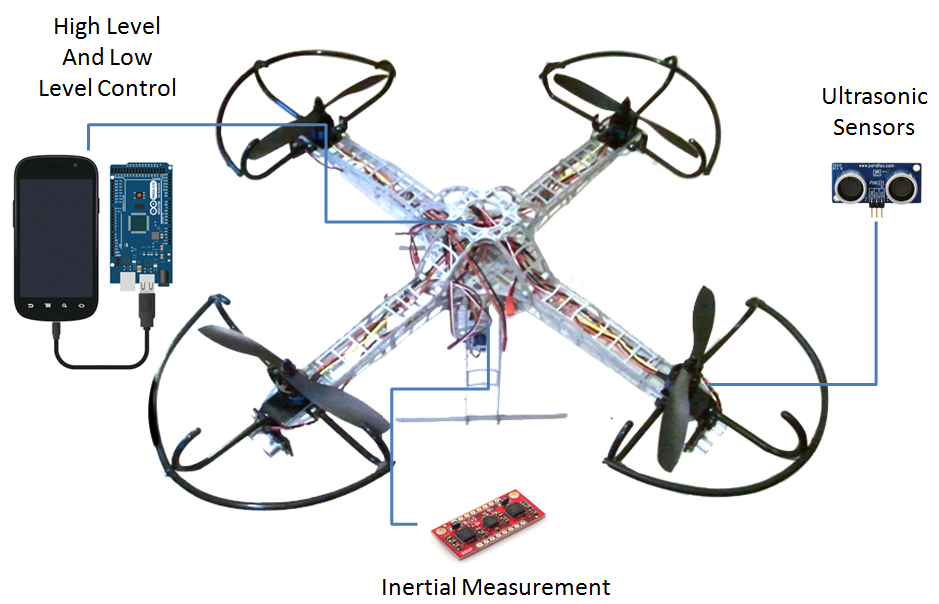
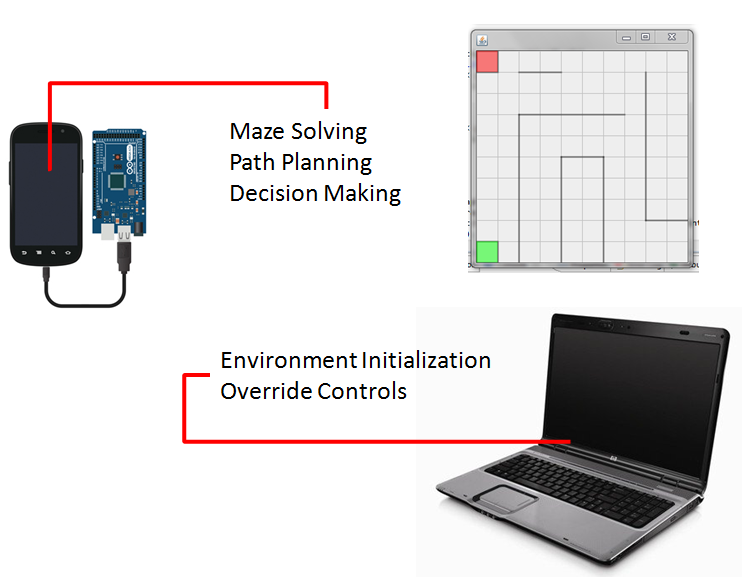
The copter was designed to work with an Android powered smart phone and Arduino ADK (Android Deveolpment Kit) microcontroller.
|
|
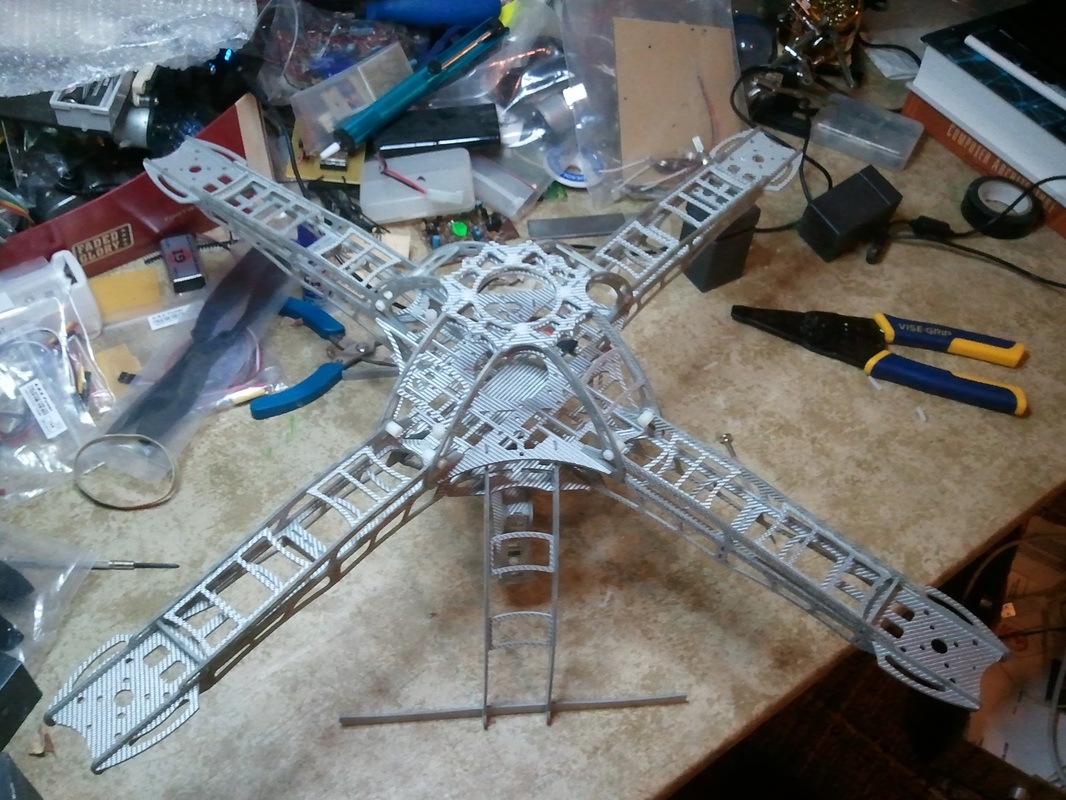
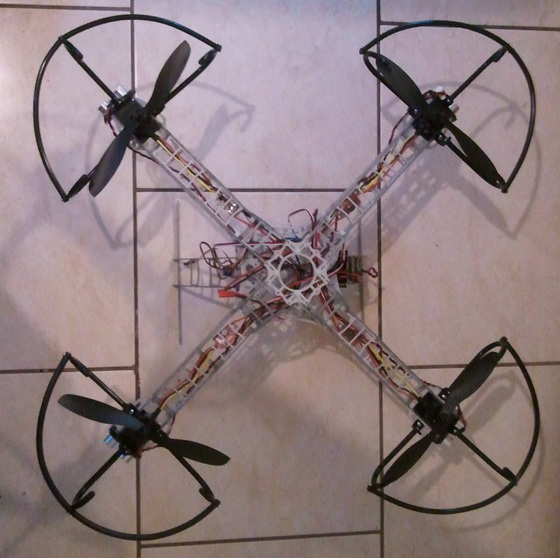
We ordered a kit that had over a hundred pieces and it took me several days to put it together. Each piece needed to be sanded and fit together and then glued.

|

|
|
The autonomous quadcopter was designed to traverse a maze so we decided to use 5 ultrasonic sensors to determine our position in the maze and to avoid obstacles. I custom made brackets that would fit on each of the copter's arms.

|

|

|
In order to protect the blades from being damaged if they hit any obstacles, I designed guards out of handmade plastic brackets and coat hangers.
|
|
|
|
Finished guards.
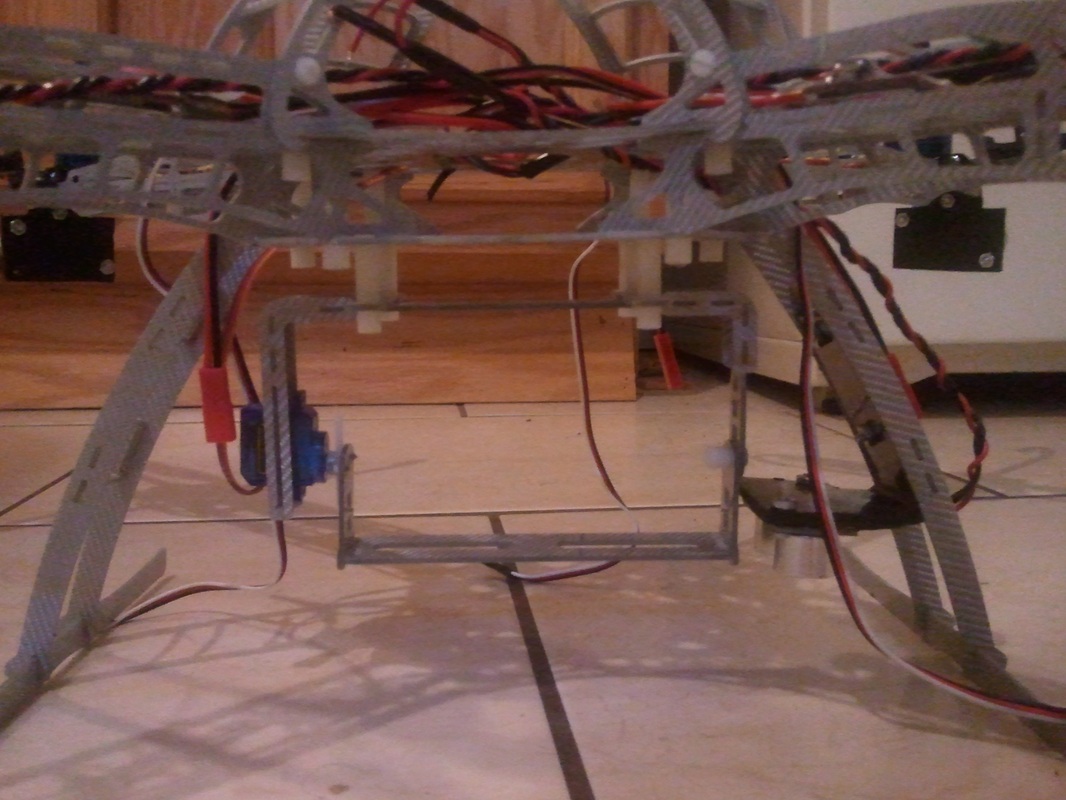
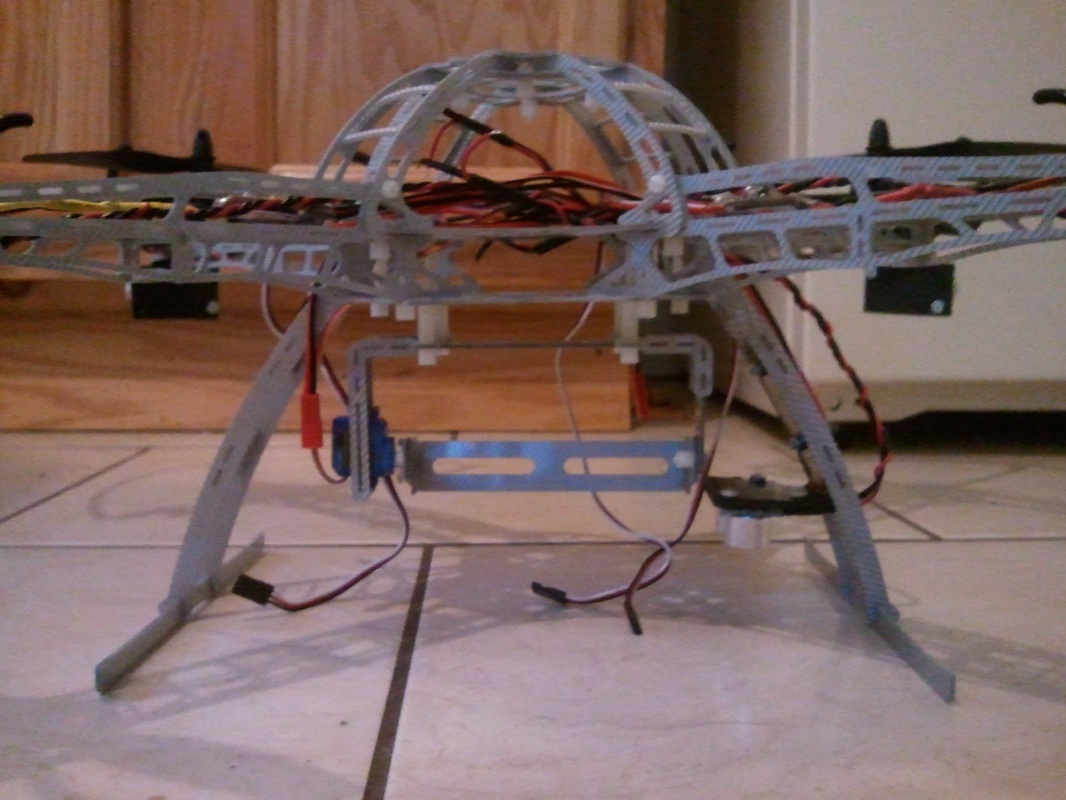
A mount was also made for the fifth ultarsonic to be pointed at the ground. I also constructed the servo controlled mount on the bottom to hold a camera phone for image processing of our surroundings.

|
|
|
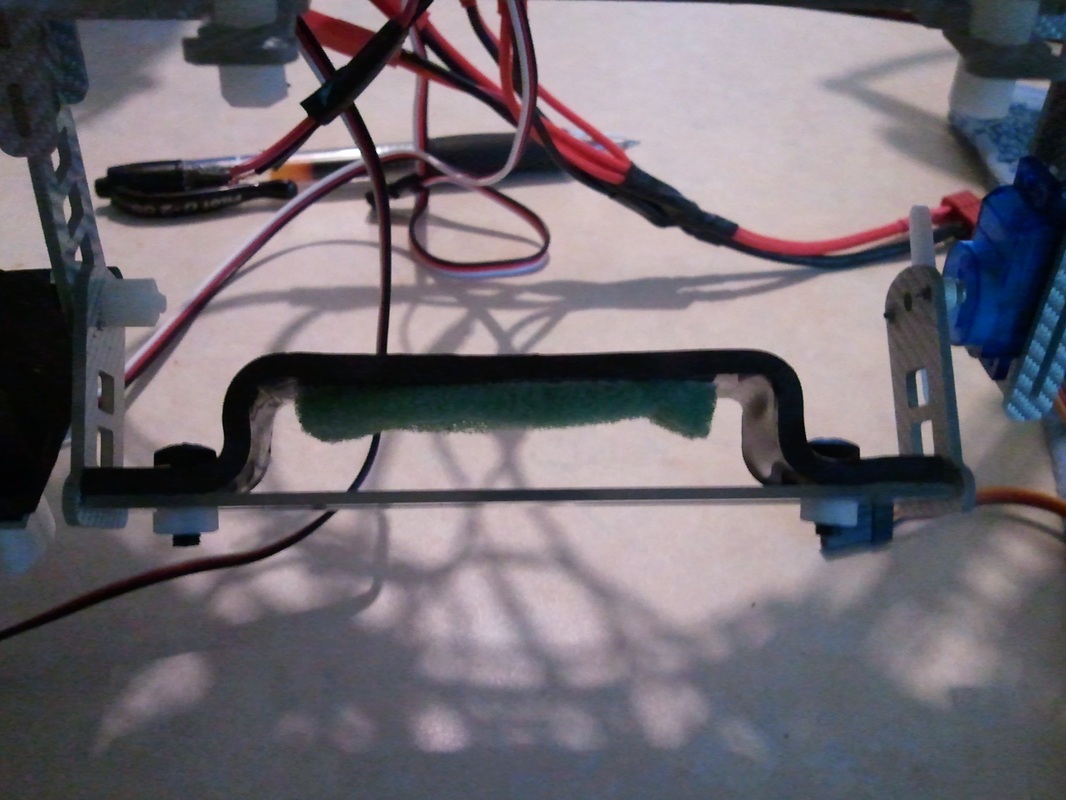
In order to make sure the phone stayed secure, I made a bracket that could be tightened down to hold the phone.

|

|
|
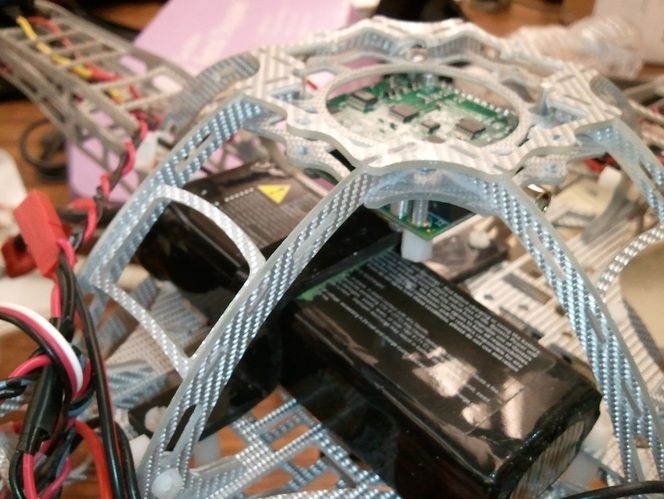
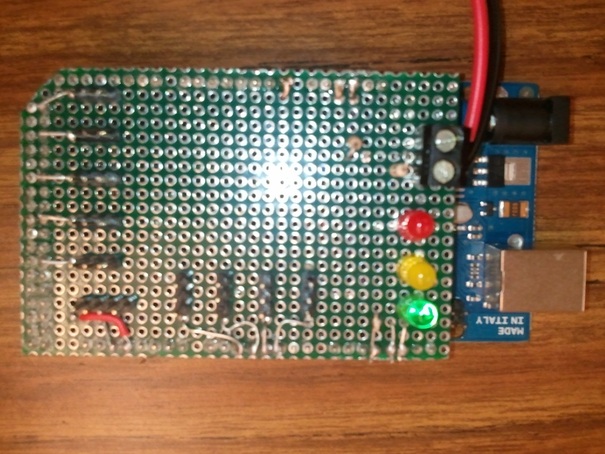
The copter was powered Lithium Polymer batteries which can sometimes be damaged if drained too hard. I designed a shield to sit on top of out Arduino ADK (Android Development Kit) microcontroller to monitor battery life so we did not damage the expensive batteries.

The shield also had headers to attach all five ultrasonic sensors and four speed controllers.
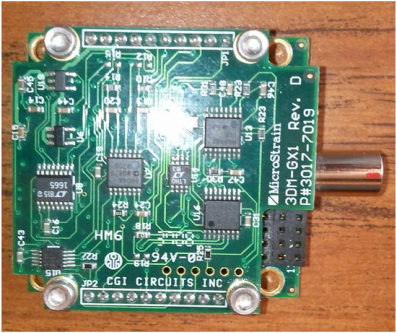
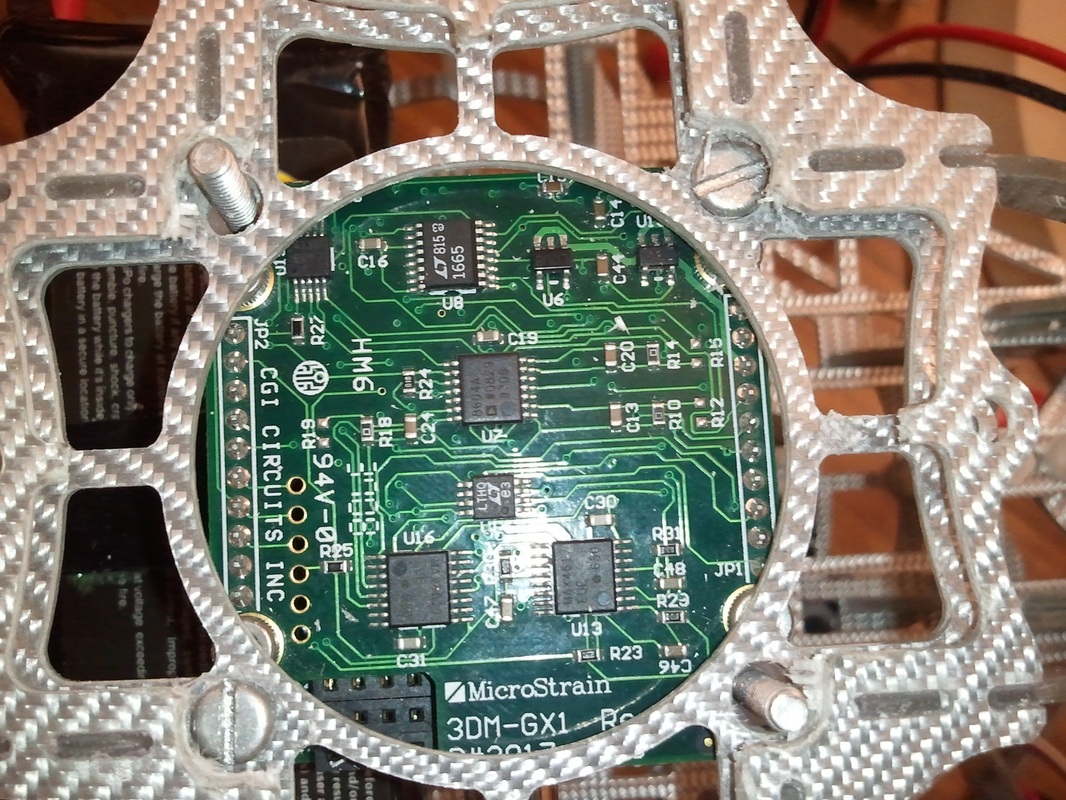
I also setup and mounted the IMU onto the copters dome and made a battery holder bracket to secure the battery in the copter.
|
|