Lunabotics NASA Competition
|
The NASA Lunabotics competition was a competition I participated in as a member of Temple University's C.R.A.T.E, or Creative Robotics at Temple Engineering, organization in my junior year of my undergratuate degree. The full details of the competition can be found at NASA's website.
Goal:
The goal of the competition is to design a robot that would be capable of collecting regolith on the moon's surface. Due to team problems and disorganization. I took lead on the project and did my best to remedy the situation and did much of the design on my own. With the help of 3 dedicated team members and myself, we managed to build a fully operating robot. We arrived at the competition in Florida ready to compete, but ran into one single problem that was not able to be resolved. The robot's wifi communication was not working with NASA's system and even the engineers their could not help our team get it to function. It was an amazing learning experience.
|
|


Beginning the Design
Being the first time the competition was being ran, there were no previous designs to consider or learn from. As the project went on, I began to take lead on the project and worked with four other student to build the lunabot in time for the competition. Below are a few sketches of the initial designs I came up with.
Being the first time the competition was being ran, there were no previous designs to consider or learn from. As the project went on, I began to take lead on the project and worked with four other student to build the lunabot in time for the competition. Below are a few sketches of the initial designs I came up with.
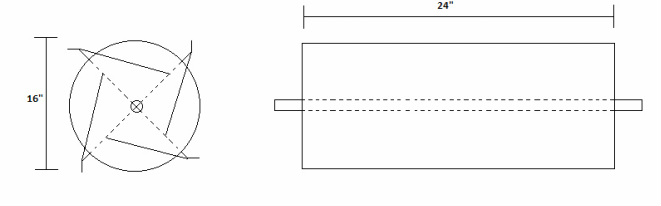
Collector
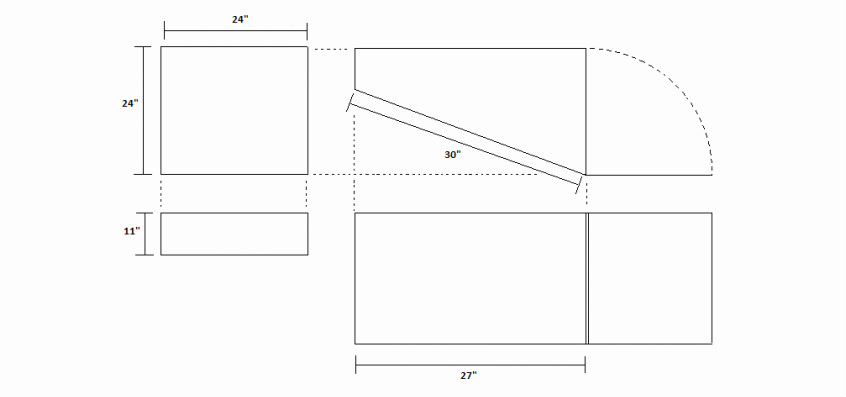
Storage/Dumper
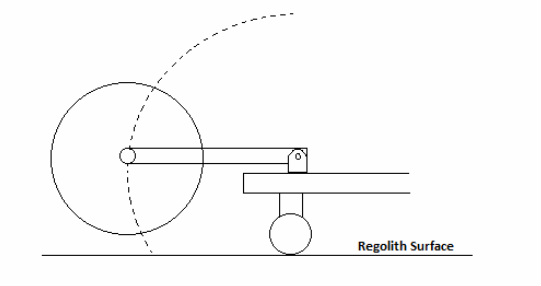
Collector Arm
Building Process
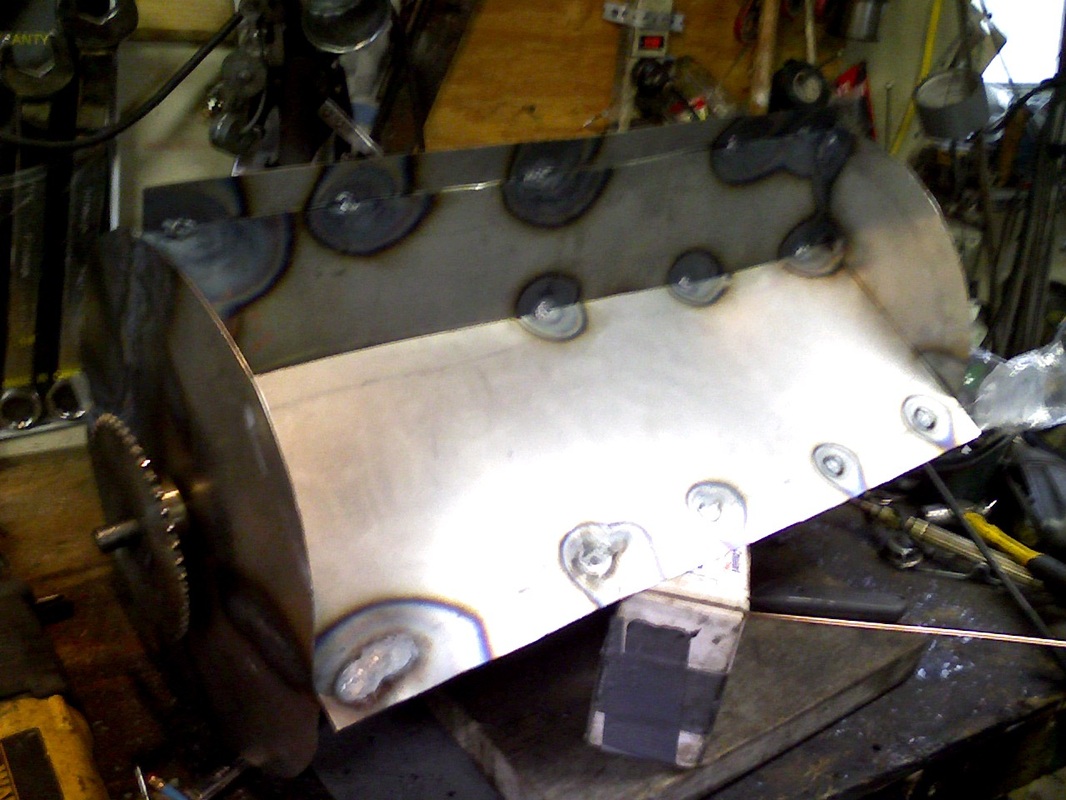
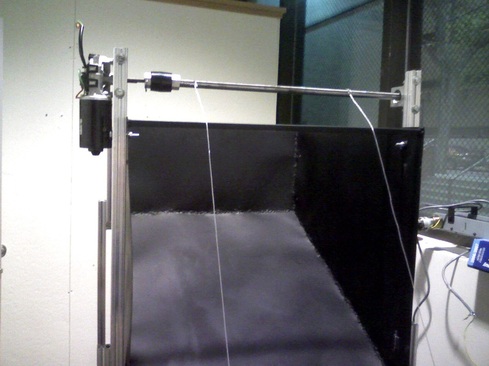
Building the collector. This was build by my father and I. We cut each piece of sheet metal and welded it together. This was my first time welding so it was a great experience.
Building the collector. This was build by my father and I. We cut each piece of sheet metal and welded it together. This was my first time welding so it was a great experience.

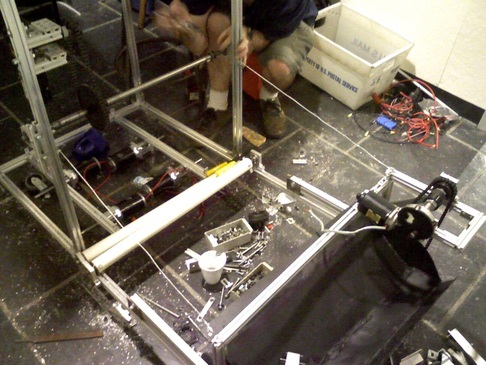
The storage unit/dumper. Teammate shown in pictures.


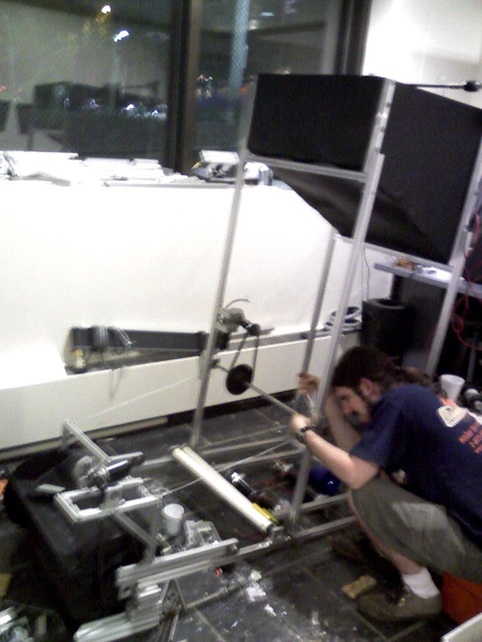
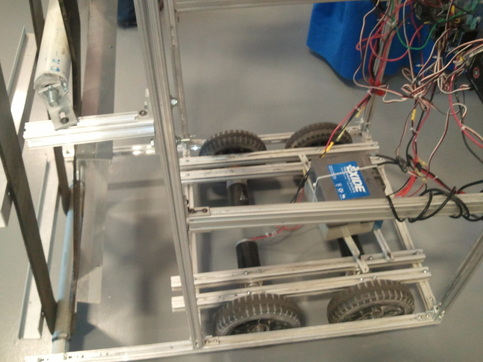
Collector mounting and designing a converyor belt system.

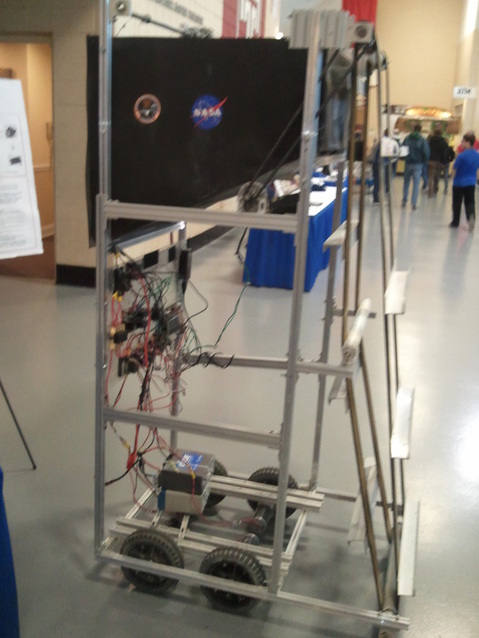
Finished Robot. All dirty from collecting dirt.


I spent hundreds of hours on the robot and it was an amazing learning opportunity. Unfortunately, I started my internship at the Office of Naval Intelligence at the same time as the competition was held in Florida, so I was unable to attend. Here is a picture of the rest of my team and our adviser, Dr. Helferty.

Our participation Award!

