Senior Design Project - Statistical Control of a Laser Targeting System
In this year long project, myself and two of my fellow schoolmates completed a senior design project to graduate with a Bachelor's Degree in Electrical Engineering from Temple University. I build/integrated all of the hardware for the system. The other two group members were tasked with software and controller design.
Abstract:
For decades proportional, integral, and derivative (PID) controllers have been the industry standard for the majority of control applications. In this time PID has become very robust; however it is not particularly sophisticated. While the constants of a PID controller can be re-tuned to maintain performance, the act of tuning does not consider the dynamic environment. Recently, control systems engineers have devised a theoretical control method called stochastic control that addresses this issue. Stochastic control theory stems from the H2 and H∞ control methods. Our group intends to implement a stochastic control algorithm in hardware using satellite attitude control as the test case. We will create a hardware test bench for implementing control algorithms and compare the performance of a PID to a stochastic controller. We expect the stochastic controller to outperform the PID controller, as various theoretical approaches have shown in the past. The satellite system simulation consists of a laser mounted on a two-axis gimbal aimed at a target. The performance of the two systems will be gauged by their ability to keep the laser dot pointed in a target area while a vibration table induces the disturbance.
Abstract:
For decades proportional, integral, and derivative (PID) controllers have been the industry standard for the majority of control applications. In this time PID has become very robust; however it is not particularly sophisticated. While the constants of a PID controller can be re-tuned to maintain performance, the act of tuning does not consider the dynamic environment. Recently, control systems engineers have devised a theoretical control method called stochastic control that addresses this issue. Stochastic control theory stems from the H2 and H∞ control methods. Our group intends to implement a stochastic control algorithm in hardware using satellite attitude control as the test case. We will create a hardware test bench for implementing control algorithms and compare the performance of a PID to a stochastic controller. We expect the stochastic controller to outperform the PID controller, as various theoretical approaches have shown in the past. The satellite system simulation consists of a laser mounted on a two-axis gimbal aimed at a target. The performance of the two systems will be gauged by their ability to keep the laser dot pointed in a target area while a vibration table induces the disturbance.
Highlights of My Individual Work
There is a full website containing all the project information and documentation: Statistical Control of a Laser Targeting System
Below is some of the documentation designed and developed by me. I developed most of the system hardware for the project. The hardware was purchased from several different vendors and required very specific wiring diagrams and pinouts. All cables used were custom made by me. The project was designed to be used as lab equipment by future graduate students working in the CSNAP lab (the lab we were funded by to build the equipment). Therefore the equipment required very detailed documentation.
Below is some of the documentation designed and developed by me. I developed most of the system hardware for the project. The hardware was purchased from several different vendors and required very specific wiring diagrams and pinouts. All cables used were custom made by me. The project was designed to be used as lab equipment by future graduate students working in the CSNAP lab (the lab we were funded by to build the equipment). Therefore the equipment required very detailed documentation.
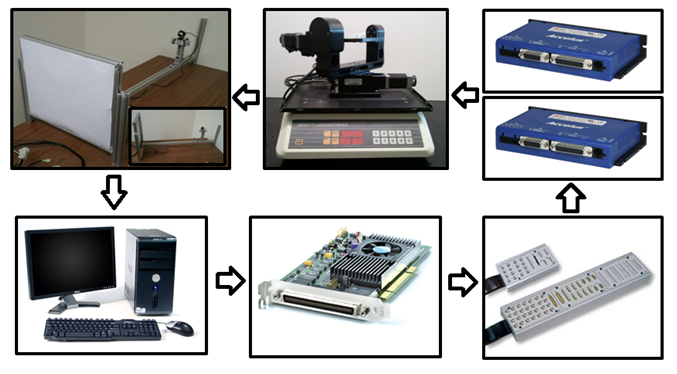
System Hardware: Laser receiver (top left), Newmark GM-6 two-axis Gimbal (top middle), Coply Controls Digital Servo Amplifiers (top right), Desktop PC Running Matlab/Simulink (bottom left), dSPACE (DS1104) Controller (bottom middle), dSPACE connection board (bottom right).
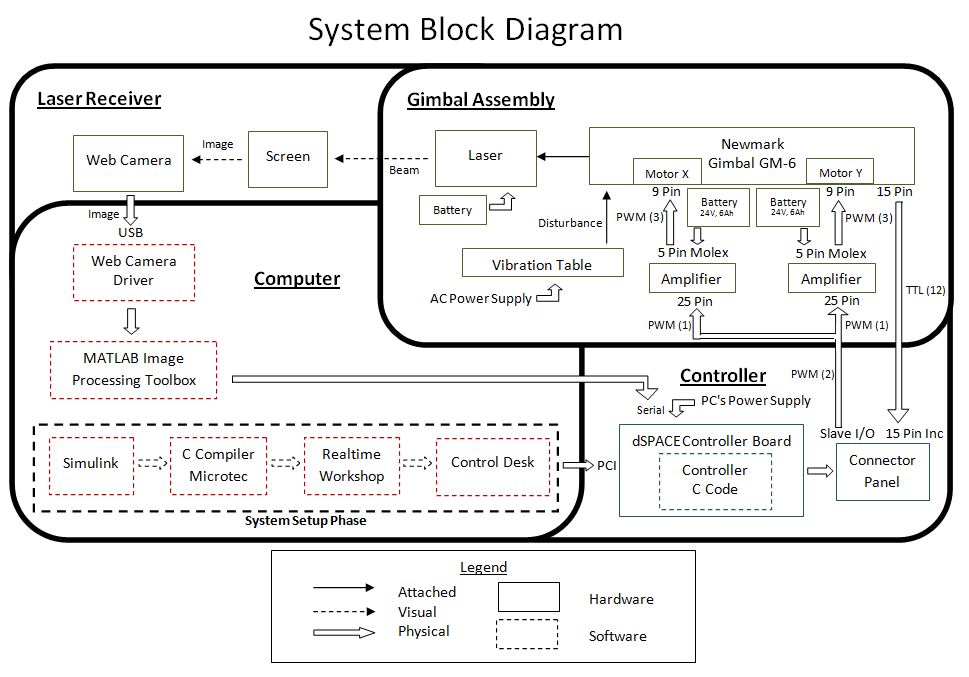
System Block Diagram: Diagram of the entire system for our senior design project. Drawn by me.
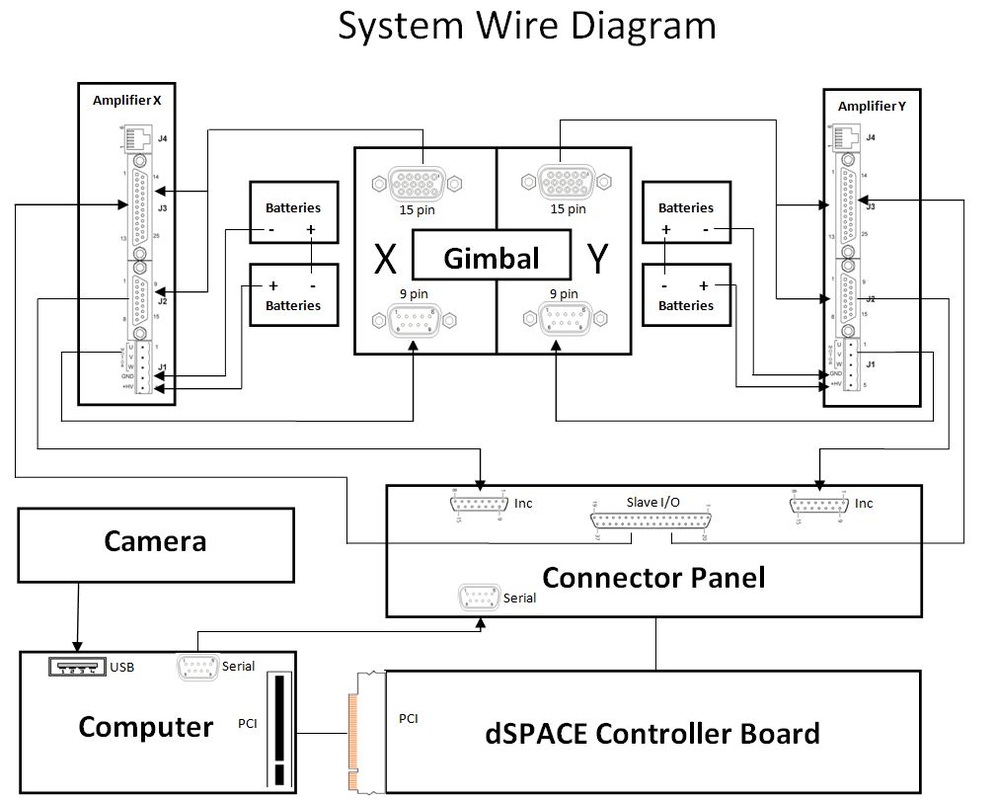
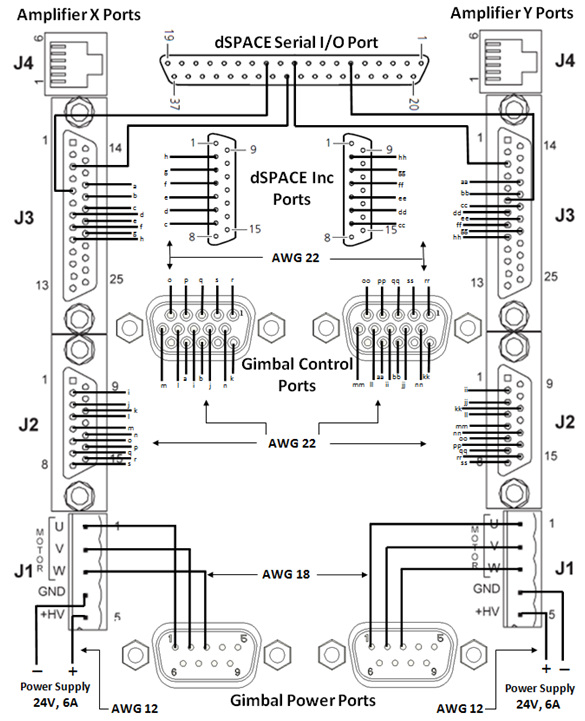
System Wire Diagram: Wire diagram for all of the hardware. Drawn by me.
Physical wire diagram: Shows physical wire connections for all of the hardware. Drawn by me.
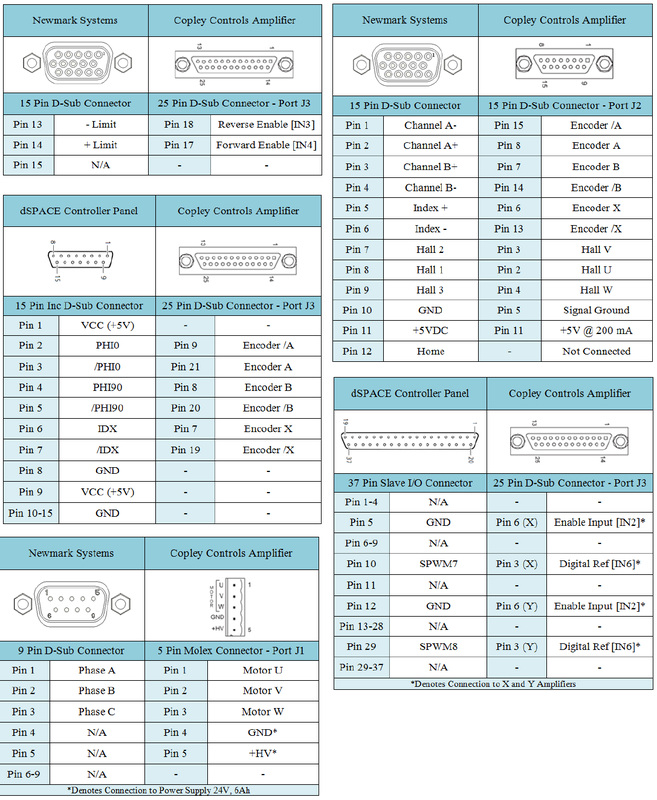
Connector Pinout Tables: Tables relating pinouts from various manufacture manuals and specification sheets for easy reference. Composed by me.