Pressure, Strain, and Temperature Sensing Robotic Arm Prototype
|
I took a Graduate Sensors course my first semester as a graduate student and it was the best course I have taken in my graduate career thus far. For our final project we were asked to propose a final project idea and complete it for our final grade in the course. My professor, who I had done previous summer research with, has a laboratory call CSNAP or Control, Sensor, Network, and Perception Laboratory. One of the research areas the lab works on is breast cancer detection technology. Myself and two other students from the lab proposed a final project of creating a prototype robotic arm that can sense pressure and temperature when it picks up an object. Our professor was interested in this project because the goal was to incorporate pressure and temperature sensors into their breast cancer detection device as well as eventually have a robotic arm controlling the device instead of a human hand. We had 1 week to design, order parts, construct, program, and compose a report. On the right shows a video of me testing the robotic arm.
I, myself, designed the robotic arm and did all programming and integration of sensors. The other teammates design and constructed the sensor circuits and performed calibration tests. Everything done is shown in the document below.
|
|
||
Overview of my Contributions to the Project
We had a very small budget for the project so we needed to find the cheapest robotic arm we could find. To build one, specifically out of servos, it would have cost almost $200. We found a cheap $39 robotic arm with dc motors that we could modify instead.

http://www.owirobot.com/robotic-arm-edge-1/
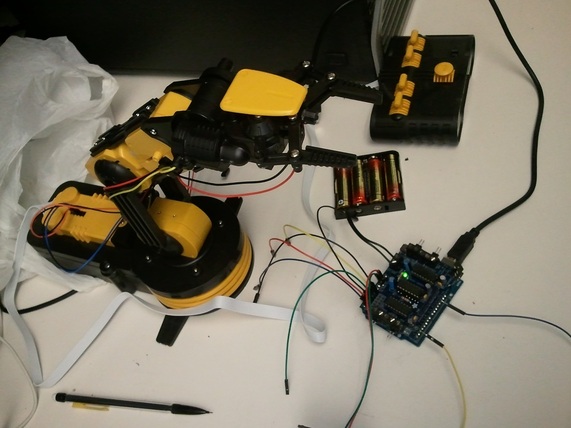
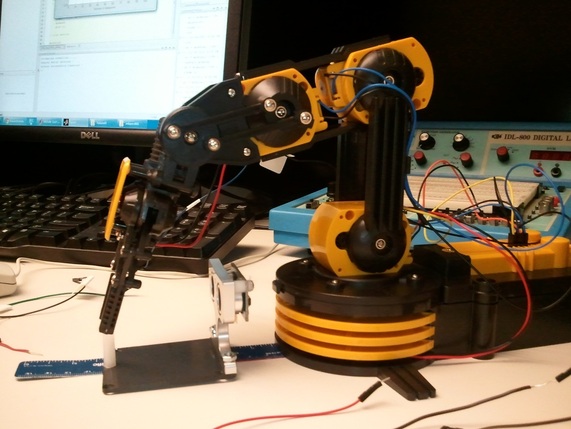
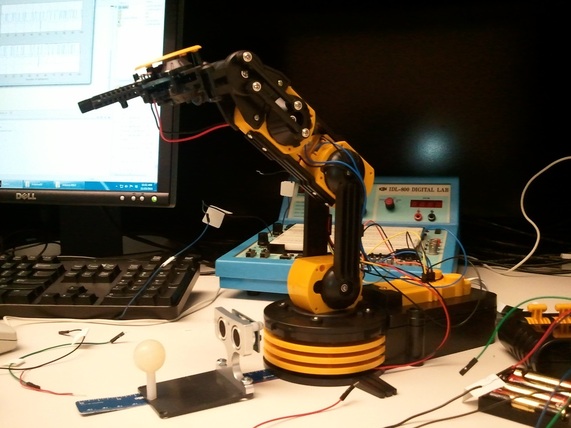
The robot came in pieces and needed to be constructed. Below is the constructed robotic arm.

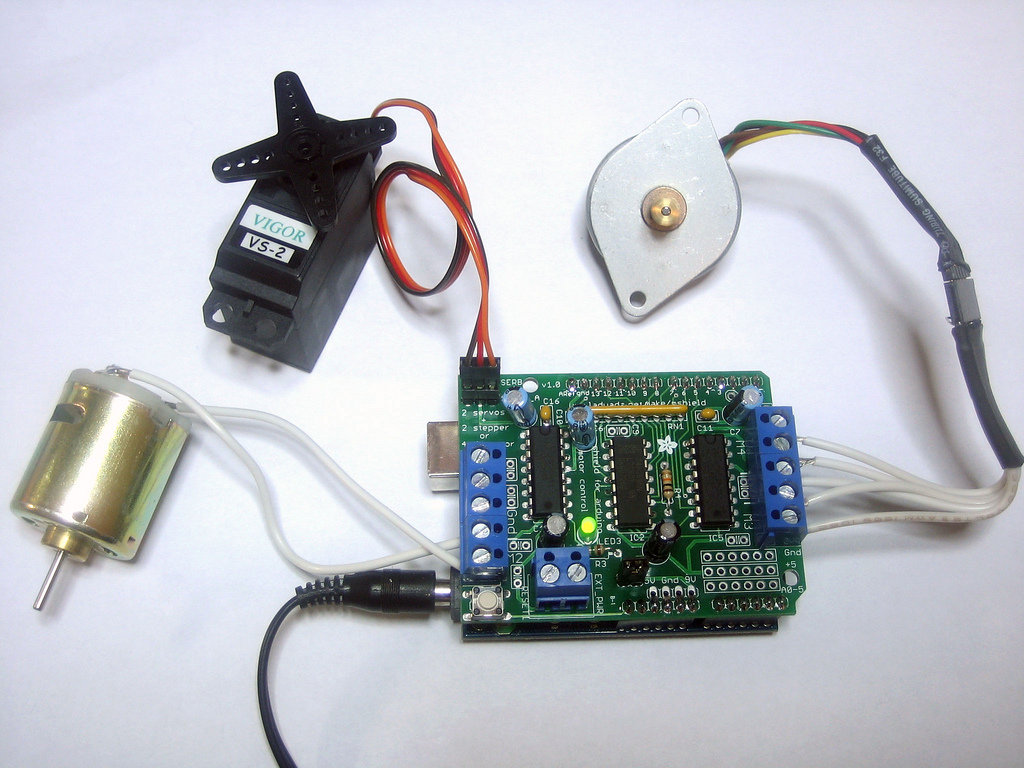
An Arduino microcontroller and dc motor shield were used to control the robotic arm.
|
|
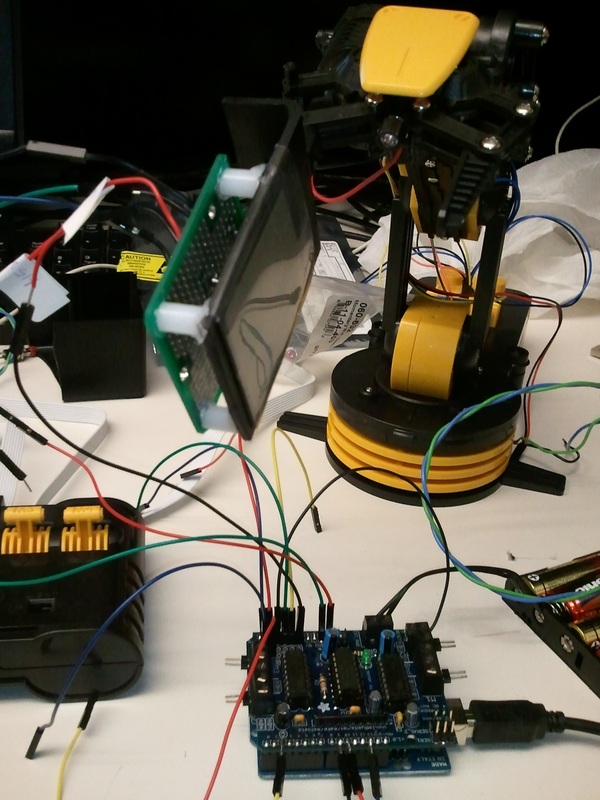
The first goal was to be able to program and control the robotic arm. I set up the dc motor shield to control each of the arm joints. One problem with dc motors is that there is no way to track their positions. This can be done using potentiometers.
|
|
|
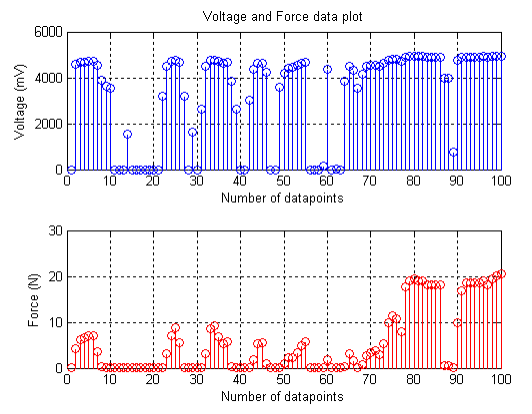
The robot was first programmed using the Arduion IDE and then translated into Matlabs Arduino toolbox so we could monitor and graph sensor data. Below is use testing the pressure sensor on the robotic arm.
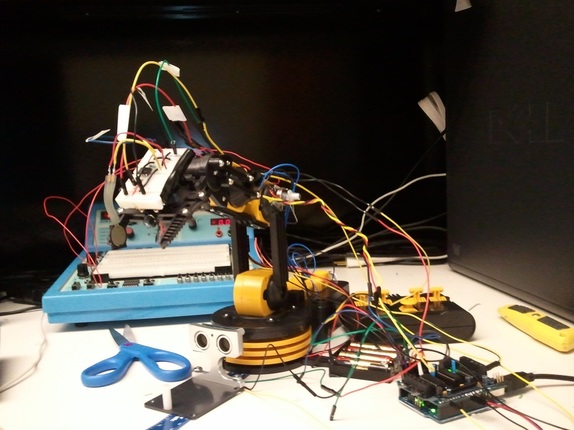
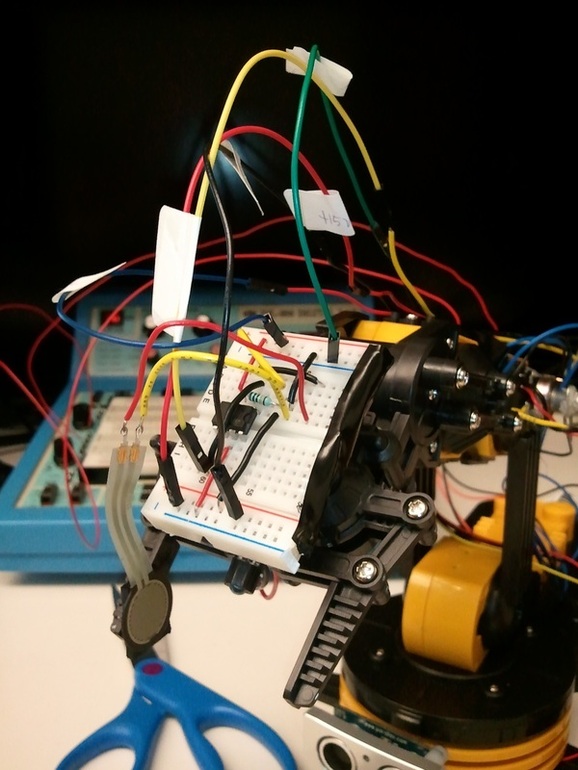
When the circuit worked, we attached a large pressure sensor and soldered together a protoboard with the amplifying circuit on it. Strain censors were placed on the back of the plastic claw. An ultra sonic sensor was also used to verify when an object was in front of the robotic arm. The temperature sensor was incorporated at the end. I do not have a picture of it.
Entire system diagram developed by me.
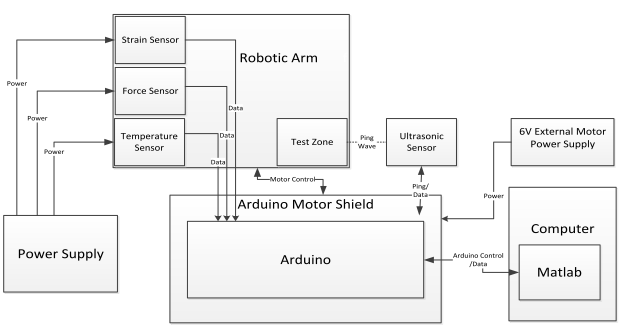
From here the robotic arm could be controlled and the the sensor data recorded, plotted, and analyzed.
For more information, view the pdf of the project report at the top of this page.
